Vision Models: Cell Segmentation#
Last updated May 31, 2023
In this section we will build a model to perform cell segmentation on phase contrast images. You can learn more about the model architecture used in this notebook in Spot Detection.

# Install the latest version of DeepCell
!pip install "deepcell==0.9.0"
import deepcell
import numpy as np
import matplotlib.pyplot as plt
Load the data#
deepcell.datasets provides access to a set of annotated live-cell imaging datasets which can be used for training cell segmentation and tracking models.
Here we create a few Dataset objects based on existing S3 files. Then we can use the load_data() function to load and split the training data. test_size is used to adjust the share of data reserved for testing and seed is used to generate the random train-test split.
base_url = ('https://deepcell-data.s3-us-west-1.amazonaws.com/'
'demos/janelia/hela_s3_{}_256.npz')
dataset = deepcell.datasets.Dataset(
path='phase.npz',
url=base_url.format('phase'),
file_hash='c56df51039fe6cae15c818118dfb8ce8',
metadata=None
)
test_size = 0.2 # fraction of data saved as test
seed = 0 # seed for random train-test split
(X_train, y_train), (X_test, y_test) = dataset.load_data(
test_size=test_size, seed=seed)
print('X_train.shape: {}\nX_test.shape: {}'.format(
X_train.shape, X_test.shape))
X_train.shape: (1872, 256, 256, 1)
X_test.shape: (468, 256, 256, 1)
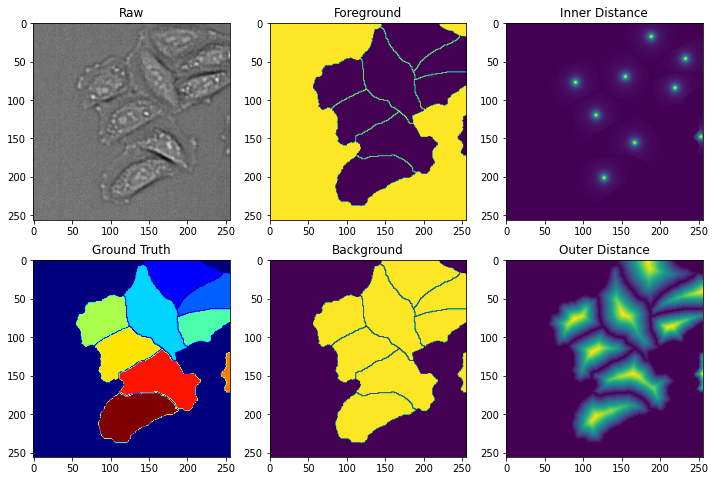
In order to segment cells from phase images, we will predict three transformations of the images. The figure below shows the raw data and ground truth masks in the first column. The second column shows the first transformation, foreground/background, which has two classes. The third column shows the two watershed transformations: inner distance and outer distance.
from deepcell.image_generators import _transform_masks
i = 400
im = X_train[i:i+1]
mask = y_train[i:i+1]
fgbg = _transform_masks(mask,'fgbg')
inner = _transform_masks(mask,'inner_distance')
outer = _transform_masks(mask,'outer_distance',erosion_distance=0)
fig,ax = plt.subplots(2,3,figsize=(12,8))
ax[0,0].imshow(np.squeeze(im),cmap='gray')
ax[0,0].set_title('Raw')
ax[1,0].imshow(np.squeeze(mask),cmap='jet')
ax[1,0].set_title('Ground Truth')
ax[0,1].imshow(fgbg[0,...,0])
ax[0,1].set_title('Foreground')
ax[1,1].imshow(fgbg[0,...,1])
ax[1,1].set_title('Background')
ax[0,2].imshow(np.squeeze(inner))
ax[0,2].set_title('Inner Distance')
ax[1,2].imshow(np.squeeze(outer))
ax[1,2].set_title('Outer Distance')
Text(0.5, 1.0, 'Outer Distance')
Create the PanopticNet Model#
Since we are predicting three different transforms of the data, we instantiate a PanopticNet model from deepcell.model_zoo using 3 semantic heads, one for each transform:
inner distance (1 class)
outer distance (1 class)
foreground/background (2 classes)
from deepcell.model_zoo.panopticnet import PanopticNet
semantic_classes = [1, 1, 2] # inner distance, outer distance, fgbg
model = PanopticNet(
backbone='resnet50',
include_top=True,
input_shape=X_train.shape[1:],
norm_method='whole_image',
num_semantic_classes=semantic_classes)
Prepare for training#
Setting up training parameters#
There are a number of tunable hyper parameters necessary for training deep learning models:
backbone: The majority of DeepCell models support a variety backbone choices specified in the “backbone” parameter. Backbones are provided through tf.keras.applications and can be instantiated with weights that are pretrained on ImageNet. Other valid backbones include vgg16, vgg19, mobilenetv2, nasnet_large, and nasnet_mobile.
n_epoch: The number of complete passes through the training dataset.
lr: The learning rate determines the speed at which the model learns. Specifically it controls the relative size of the updates to model weights after each batch.
optimizer: “Optimizers” are algorithms that are used to update the model weights to minimize the loss function. The TensorFlow module tf.keras.optimizers offers optimizers with a variety of algorithm implementations. DeepCell typically uses the Adam or the SGD optimizers.
lr_sched: A learning rate scheduler allows the learning rate to adapt over the course of model training. Typically a larger learning rate is preferred during the start of the training process, while a small learning rate allows for fine-tuning during the end of training.
batch_size: The batch size determines the number of samples that are processed before the model is updated. The value must be greater than one and less than or equal to the number of samples in the training dataset.
min_objects: Only trains on images with at least this many instances.
from tensorflow.keras.optimizers import SGD, Adam
from deepcell.utils.train_utils import rate_scheduler
n_epoch = 5
lr = 1e-4
optimizer = Adam(lr=lr, clipnorm=0.001)
lr_sched = rate_scheduler(lr=lr, decay=0.99)
batch_size = 8
min_objects = 2
Create the DataGenerators#
The SemanticDataGenerator can output any number of transformations for each image. These transformations are passed to generator.flow() as a list of transform names.
Here we use “inner-distance”, “outer-distance” and “fgbg” to correspond to the inner distance, outer distance, and foreground background semantic heads, respectively. Keyword arguments may also be passed to each transform as a dict of transform names to kwargs.
from deepcell import image_generators
transforms = ['inner-distance', 'outer-distance', 'fgbg']
transforms_kwargs = {'outer-distance': {'erosion_width': 0}}
# use augmentation for training but not validation
datagen = image_generators.SemanticDataGenerator(
rotation_range=180,
fill_mode='reflect',
zoom_range=(0.75, 1.25),
horizontal_flip=True,
vertical_flip=True)
datagen_val = image_generators.SemanticDataGenerator()
train_data = datagen.flow(
{'X': X_train, 'y': y_train},
seed=seed,
transforms=transforms,
transforms_kwargs=transforms_kwargs,
min_objects=min_objects,
batch_size=batch_size)
val_data = datagen_val.flow(
{'X': X_test, 'y': y_test},
seed=seed,
transforms=transforms,
transforms_kwargs=transforms_kwargs,
min_objects=min_objects,
batch_size=batch_size)
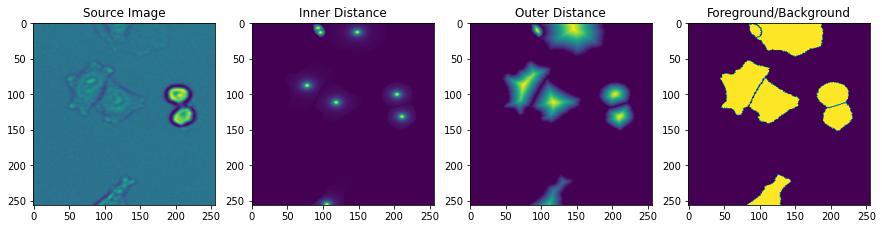
Now that our datasets are set up, we can call train_data.next() to check the output, which should match what we looked at in the previous figure.
inputs, outputs = train_data.next()
img = inputs[0]
inner_distance = outputs[0]
outer_distance = outputs[1]
fgbg = outputs[2]
fig, axes = plt.subplots(1, 4, figsize=(15, 15))
axes[0].imshow(img[..., 0])
axes[0].set_title('Source Image')
axes[1].imshow(inner_distance[0, ..., 0])
axes[1].set_title('Inner Distance')
axes[2].imshow(outer_distance[0, ..., 0])
axes[2].set_title('Outer Distance')
axes[3].imshow(fgbg[0, ..., 1])
axes[3].set_title('Foreground/Background')
plt.show()
Create a loss function for each semantic head#
Each semantic head is trained with it’s own loss function. Mean Square Error is used for regression-based heads, whereas weighted_categorical_crossentropy is used for classification heads.
The losses are saved as a dictionary and passed to model.compile.
# Create a dictionary of losses for each semantic head
from tensorflow.keras.losses import MSE
from deepcell.losses import weighted_categorical_crossentropy
def semantic_loss(n_classes):
def _semantic_loss(y_pred, y_true):
if n_classes > 1:
return 0.01 * weighted_categorical_crossentropy(
y_pred, y_true, n_classes=n_classes)
return MSE(y_pred, y_true)
return _semantic_loss
loss = {}
# Give losses for all of the semantic heads
for layer in model.layers:
if layer.name.startswith('semantic_'):
n_classes = layer.output_shape[-1]
loss[layer.name] = semantic_loss(n_classes)
model.compile(loss=loss, optimizer=optimizer)
Train the model#
Call model.fit() on the compiled model, with a default set of callbacks.
from deepcell.utils.train_utils import get_callbacks
from deepcell.utils.train_utils import count_gpus
model_name = 'phase_deep_watershed'
model_path = '{}.h5'.format(model_name)
print('Training on', count_gpus(), 'GPUs.')
train_callbacks = get_callbacks(
model_path,
lr_sched=lr_sched,
monitor='val_loss',
verbose=1)
loss_history = model.fit(
train_data,
steps_per_epoch=train_data.y.shape[0] // batch_size,
epochs=n_epoch,
validation_data=val_data,
validation_steps=val_data.y.shape[0] // batch_size,
callbacks=train_callbacks)
Training on 1 GPUs.
Epoch 1/5
234/234 [==============================] - 132s 491ms/step - loss: 0.2044 - semantic_0_loss: 0.0081 - semantic_1_loss: 0.1931 - semantic_2_loss: 0.0032 - val_loss: 0.1349 - val_semantic_0_loss: 0.0045 - val_semantic_1_loss: 0.0618 - val_semantic_2_loss: 0.0686
Epoch 00001: val_loss improved from inf to 0.13486, saving model to phase_deep_watershed.h5
Epoch 2/5
234/234 [==============================] - 113s 482ms/step - loss: 0.0108 - semantic_0_loss: 0.0024 - semantic_1_loss: 0.0074 - semantic_2_loss: 0.0010 - val_loss: 0.0502 - val_semantic_0_loss: 0.0045 - val_semantic_1_loss: 0.0365 - val_semantic_2_loss: 0.0092
Epoch 00002: val_loss improved from 0.13486 to 0.05022, saving model to phase_deep_watershed.h5
Epoch 3/5
234/234 [==============================] - 113s 480ms/step - loss: 0.0133 - semantic_0_loss: 0.0025 - semantic_1_loss: 0.0098 - semantic_2_loss: 9.0433e-04 - val_loss: 0.0126 - val_semantic_0_loss: 0.0024 - val_semantic_1_loss: 0.0084 - val_semantic_2_loss: 0.0018
Epoch 00003: val_loss improved from 0.05022 to 0.01263, saving model to phase_deep_watershed.h5
Epoch 4/5
234/234 [==============================] - 112s 478ms/step - loss: 0.0088 - semantic_0_loss: 0.0022 - semantic_1_loss: 0.0058 - semantic_2_loss: 8.4244e-04 - val_loss: 0.0093 - val_semantic_0_loss: 0.0022 - val_semantic_1_loss: 0.0061 - val_semantic_2_loss: 0.0010
Epoch 00004: val_loss improved from 0.01263 to 0.00931, saving model to phase_deep_watershed.h5
Epoch 5/5
234/234 [==============================] - 112s 479ms/step - loss: 0.0078 - semantic_0_loss: 0.0020 - semantic_1_loss: 0.0049 - semantic_2_loss: 7.9971e-04 - val_loss: 0.0079 - val_semantic_0_loss: 0.0020 - val_semantic_1_loss: 0.0051 - val_semantic_2_loss: 8.0669e-04
Epoch 00005: val_loss improved from 0.00931 to 0.00794, saving model to phase_deep_watershed.h5
Predict on test data#
Use the trained model to predict on new data. First, create a new prediction model without the foreground background semantic head. While this head is very useful during training, the output is unused during prediction. By using model.load_weights(path, by_name=True), the semantic head can be removed.
from deepcell.model_zoo.panopticnet import PanopticNet
prediction_model = PanopticNet(
backbone='resnet50',
include_top=True,
norm_method='whole_image',
num_semantic_classes=[1, 1], # inner distance, outer distance
input_shape=X_train.shape[1:]
)
prediction_model.load_weights(model_path, by_name=True)
# make predictions on testing data
from timeit import default_timer
start = default_timer()
test_images = prediction_model.predict(X_test)
watershed_time = default_timer() - start
print('Watershed segmentation of shape', test_images[0].shape,
'in', watershed_time, 'seconds.')
Watershed segmentation of shape (468, 256, 256, 1) in 4.126937585999258 seconds.
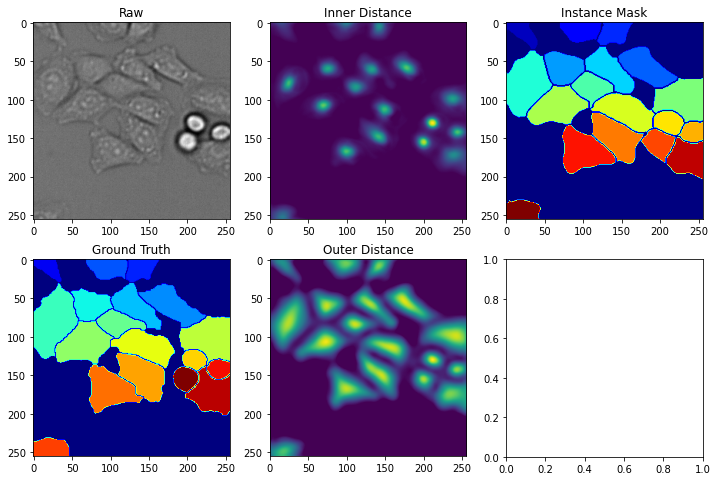
Now that we have predictions stored in test_images, we can import a post-processing function from deepcell_toolbox to transform the predictions into an instance mask.
import random
from deepcell_toolbox.deep_watershed import deep_watershed
index = random.randint(0, X_test.shape[0])
print(index)
fig, axes = plt.subplots(2, 3, figsize=(12, 8))
masks = deep_watershed(
test_images,
min_distance=10,
detection_threshold=0.1,
distance_threshold=0.01,
exclude_border=False,
small_objects_threshold=0)
# calculated in the postprocessing above, but useful for visualizing
inner_distance = test_images[0]
outer_distance = test_images[1]
# raw image with centroid
axes[0,0].imshow(X_test[index, ..., 0], cmap='gray')
axes[0,0].set_title('Raw')
axes[1,0].imshow(y_test[index,...,0], cmap='jet')
axes[1,0].set_title('Ground Truth')
axes[0,1].imshow(inner_distance[index, ..., 0])
axes[0,1].set_title('Inner Distance')
axes[1,1].imshow(outer_distance[index, ..., 0])
axes[1,1].set_title('Outer Distance')
axes[0,2].imshow(masks[index, ...], cmap='jet')
axes[0,2].set_title('Instance Mask')
plt.show()
111
Evaluate results#
The deepcell.metrics package is used to measure advanced metrics for instance segmentation predictions. Below we will primarily focus on recall and precision.
recall: The fraction of the total amount of instances that were actually detected. ( TP / (TP + FN) )
precision: The fraction of instances among the detected instances. ( TP / (TP + FP) )
from skimage.morphology import watershed, remove_small_objects
from skimage.segmentation import clear_border
from deepcell.metrics import Metrics
y_pred = np.expand_dims(masks.copy(), axis=-1)
y_true = y_test.copy()
m = Metrics('DeepWatershed - Remove no pixels', seg=False)
m.calc_object_stats(y_true, y_pred)
____________Object-based statistics____________
Number of true cells: 4727
Number of predicted cells: 4140
Correct detections: 3922 Recall: 82.9702%
Incorrect detections: 218 Precision: 94.7343%
Gained detections: 74 Perc Error: 9.0686%
Missed detections: 654 Perc Error: 80.1471%
Merges: 38 Perc Error: 4.6569%
Splits: 32 Perc Error: 3.9216%
Catastrophes: 18 Perc Error: 2.2059%
Gained detections from splits: 33
Missed detections from merges: 41
True detections involved in catastrophes: 40
Predicted detections involved in catastrophes: 41
Average Pixel IOU (Jaccard Index): 0.8863
%load_ext watermark
%watermark -u -d -vm --iversions
The watermark extension is already loaded. To reload it, use:
%reload_ext watermark
deepcell 0.9.0
numpy 1.19.5
last updated: 2021-04-27
CPython 3.6.9
IPython 7.16.1
compiler : GCC 8.4.0
system : Linux
release : 4.15.0-142-generic
machine : x86_64
processor : x86_64
CPU cores : 24
interpreter: 64bit